
Stabilizacja trickowa – dlaczego ciało potrafi wyglądać stabilnie, a w rzeczywistości jest kompletnie niestabilne
Mar 07, 2026
Stabilizacja trickowa – dlaczego ciało potrafi wyglądać stabilnie, a w rzeczywistości jest kompletnie niestabilne
Jednym z największych problemów współczesnego treningu jest to, że ciało może wyglądać stabilnie, a w rzeczywistości jest niestabilne strukturalnie i neurologicznie.
Na pierwszy rzut oka wszystko wygląda poprawnie:
-
ćwiczenie jest wykonane
-
zakres ruchu jest zachowany
-
napięcie mięśniowe jest obecne
-
ruch nie wygląda „źle”
A mimo tego pojawia się:
-
ból barku
-
ból biodra
-
przeciążenia stopy
-
przeciążenia odcinka lędźwiowego
To właśnie zjawisko w koncepcji GSP – Global System Patterns nazywamy:
stabilizacją trickową.
To sytuacja, w której ciało stabilizuje się nie poprzez prawidłową biomechanikę, lecz poprzez kompensacyjne napięcie mięśni.
Układ nerwowy nie dba o estetykę ruchu.
Nie dba o to, czy ruch wygląda dobrze na nagraniu.
Układ nerwowy dba o jedno:
przetrwanie.
Jeżeli jakaś struktura jest niestabilna, organizm natychmiast ją zabezpiecza.
Najczęściej robi to poprzez zwiększenie napięcia mięśniowego.
I w tym momencie powstaje stabilizacja trickowa.
Zobacz na film jaki nagraliśmy już w 2023 roku jeszcze na starej siłowni w Gorzowie Wielkopolskim:
Dlaczego stabilizacja trickowa jest tak powszechna
Układ ruchu jest systemem połączonych elementów.
- Stopa wpływa na kolano.
- Kolano wpływa na biodro.
- Biodro wpływa na miednicę.
- Miednica wpływa na kręgosłup.
- Kręgosłup wpływa na bark.
Jeżeli jeden element układu przestaje działać poprawnie, inne elementy przejmują jego funkcję.
Właśnie wtedy pojawiają się kompensacje.
Najczęściej są to:
-
nadmiernie napięte mięśnie stabilizujące
-
ograniczenie zakresu ruchu
-
zmiana wektorów siły
-
zaburzony timing mięśniowy
W praktyce oznacza to, że ciało buduje stabilność poprzez blokowanie ruchu.
To stabilność pozorna.
Stabilność strukturalna vs stabilność kompensacyjna
Aby zrozumieć stabilizację trickową, trzeba rozróżnić dwa typy stabilności.
Stabilność strukturalna
To stabilność wynikająca z:
-
ustawienia kości
-
napięcia powięzi
-
pracy taśm mięśniowych
-
prawidłowego przenoszenia sił
Taka stabilność jest ekonomiczna energetycznie.
Ciało nie musi walczyć z grawitacją.
Ruch jest płynny i wydajny.
Stabilność kompensacyjna
To stabilność tworzona przez:
-
nadmierne napięcie mięśni
-
blokowanie zakresów
-
skracanie wektorów siły
To stabilność bardzo kosztowna energetycznie.
I to właśnie ona jest stabilizacją trickową.
Gdzie najczęściej pojawia się stabilizacja trickowa
W praktyce GSP stabilizacja trickowa najczęściej pojawia się w kilku miejscach.
Stopa
Najczęściej przeciążony jest:
-
piszczelowy tylny
-
zginacz długi palucha
-
grupa mięśni strzałkowych
Mięśnie te zaczynają stabilizować stopę w sposób kompensacyjny.
Miednica
Tutaj najczęściej nadaktywny jest:
-
biodrowo-lędźwiowy
-
czworoboczny lędźwi
-
pośladkowy średni
Miednica zaczyna stabilizować się napięciem mięśniowym zamiast ustawieniem strukturalnym.
Zobacz artykuł: Mit pośladkowego średniego
Tułów
Najczęściej nadmiernie napięte są:
-
prostownik grzbietu
-
skośne brzucha
To daje iluzję stabilnego „core”.
Ale w rzeczywistości oznacza brak stabilności strukturalnej.
Zobacz także: mit core
Łopatka
Najczęściej nadaktywny jest:
-
równoległoboczny
-
dźwigacz łopatki
-
górna część czworobocznego
Mięśnie te blokują ruch łopatki względem klatki piersiowej.
Dlaczego klasyczna stabilizacja często pogłębia problem
To jeden z największych paradoksów treningu.
Wiele metod próbuje rozwiązać problem stabilizacji poprzez:
-
więcej stabilizacji
-
więcej napięcia
-
więcej ćwiczeń core
Najczęściej są to:
-
plank
-
hollow body
-
izometryczne stabilizacje
Problem polega na tym, że bardzo często wzmacniają one mechanizm kompensacji.
Czyli dokładnie to, co stworzyło problem.
Bo nie zmieniają najważniejszego elementu:
ustawienia biomechanicznego układu.
Drzewo decyzyjne GSP
Właśnie dlatego w koncepcji GSP praca zawsze odbywa się według określonej kolejności.
Drzewo decyzyjne wygląda następująco:
1️⃣ stopa
2️⃣ ASIS / PSIS
3️⃣ taśmy mięśniowe
5️⃣ tułów i łopatka
6️⃣ dopiero na końcu obciążenie
Ta kolejność nie jest przypadkowa.
Jeżeli zaczniemy od góry, stabilizacja trickowa pojawi się natychmiast.
Studium przypadku – konsultacja z Arkiem
Dobrym przykładem stabilizacji trickowej jest konsultacja z Arkiem.
Cały proces pracy zaczęliśmy od prawej stopy.
Stopa miała tendencję do supinowania, a mięsień piszczelowy tylny był bardzo napięty.
Nie wynikało to jednak z jego słabości.
Wręcz przeciwnie.
Mięsień był nadmiernie aktywny, ponieważ pełnił funkcję stabilizacyjną dla całego układu.
To klasyczny przykład stabilizacji trickowej.
Po jego rozluźnieniu pojawił się ruch palucha góra–dół.
To pokazało, że zakres był zablokowany funkcjonalnie, a nie strukturalnie.
Stopa Mortona – dlaczego nie była głównym problemem
Arek ma również cechę stopy Mortona, czyli drugi palec dłuższy od pierwszego.
W wielu podejściach biomechanicznych uznano by to za główną przyczynę problemów.
W koncepcji GSP patrzymy na to inaczej.
Cechy strukturalne nie zawsze są źródłem problemu.
Często są tylko tłem biomechanicznym.
U Arka ważniejszy był inny element:
opuszczony lewy paluch.
To zaburzało podporę i przenoszenie sił w kroku.
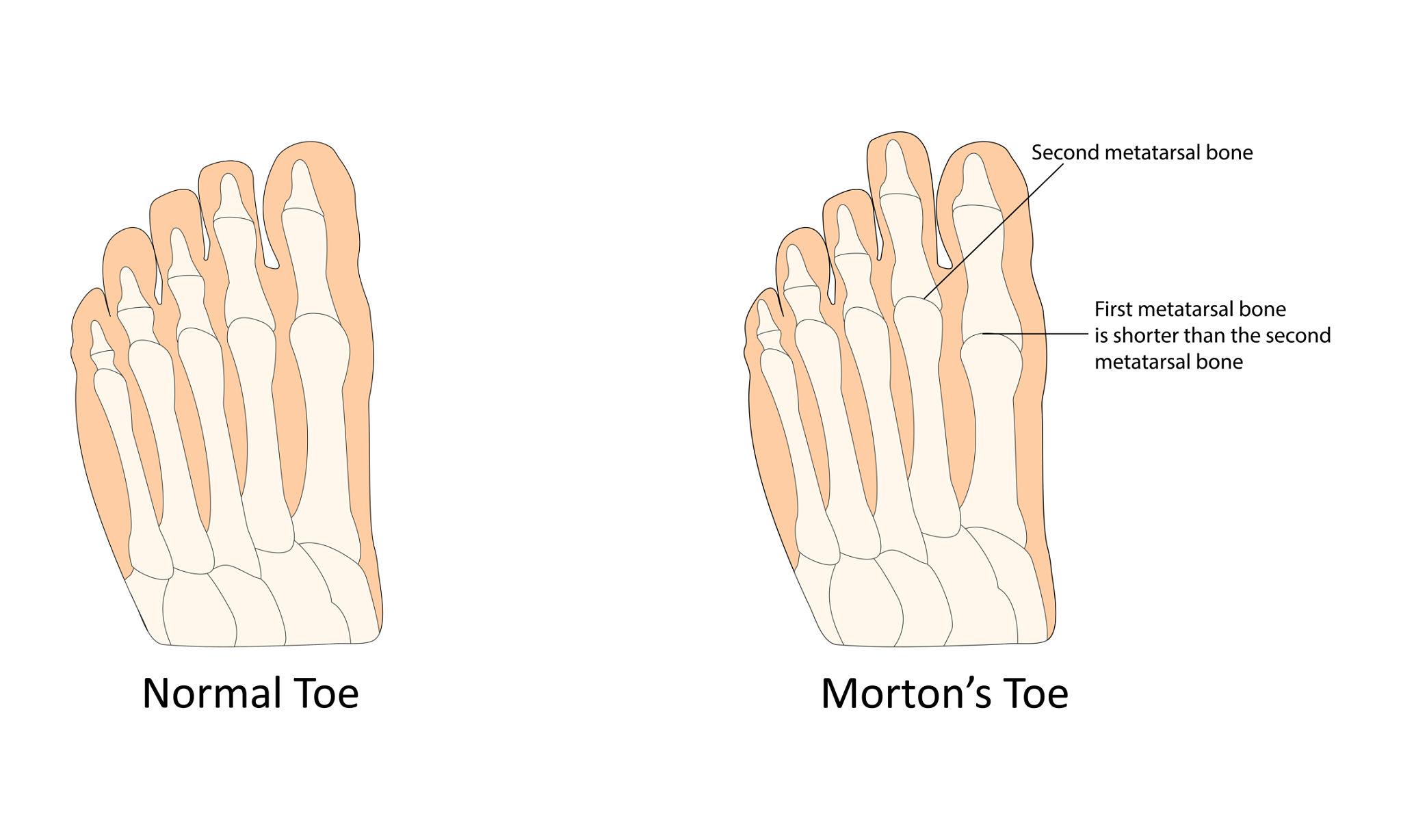
Stopa Mortona – drugi palec dłuższy niż pierwszy.
Włączenie brzucha – moment przełomowy
Po uporządkowaniu pracy stopy przeszliśmy do tułowia.
Kluczowe było włączenie mięśnia poprzecznego brzucha.
To mięsień odpowiedzialny za:
-
stabilizację ciśnienia w jamie brzusznej
-
ustawienie miednicy
-
stabilizację kręgosłupa
Dopiero po jego aktywacji układ zaczął stabilizować się globalnie.
To bardzo częsty moment przełomowy w pracy z zawodnikami.
Bark – gdzie stabilizacja trickowa pojawia się najczęściej
W kolejnym etapie pracy skupiliśmy się na barku.
Najczęściej stabilizacja trickowa barku pojawia się poprzez napięcie:
-
podłopatkowego
-
długiej głowy bicepsa
-
równoległobocznego
Mięśnie te zaczynają pełnić funkcję stabilizacyjną.
Ale robią to kosztem prawidłowej mechaniki łopatki.
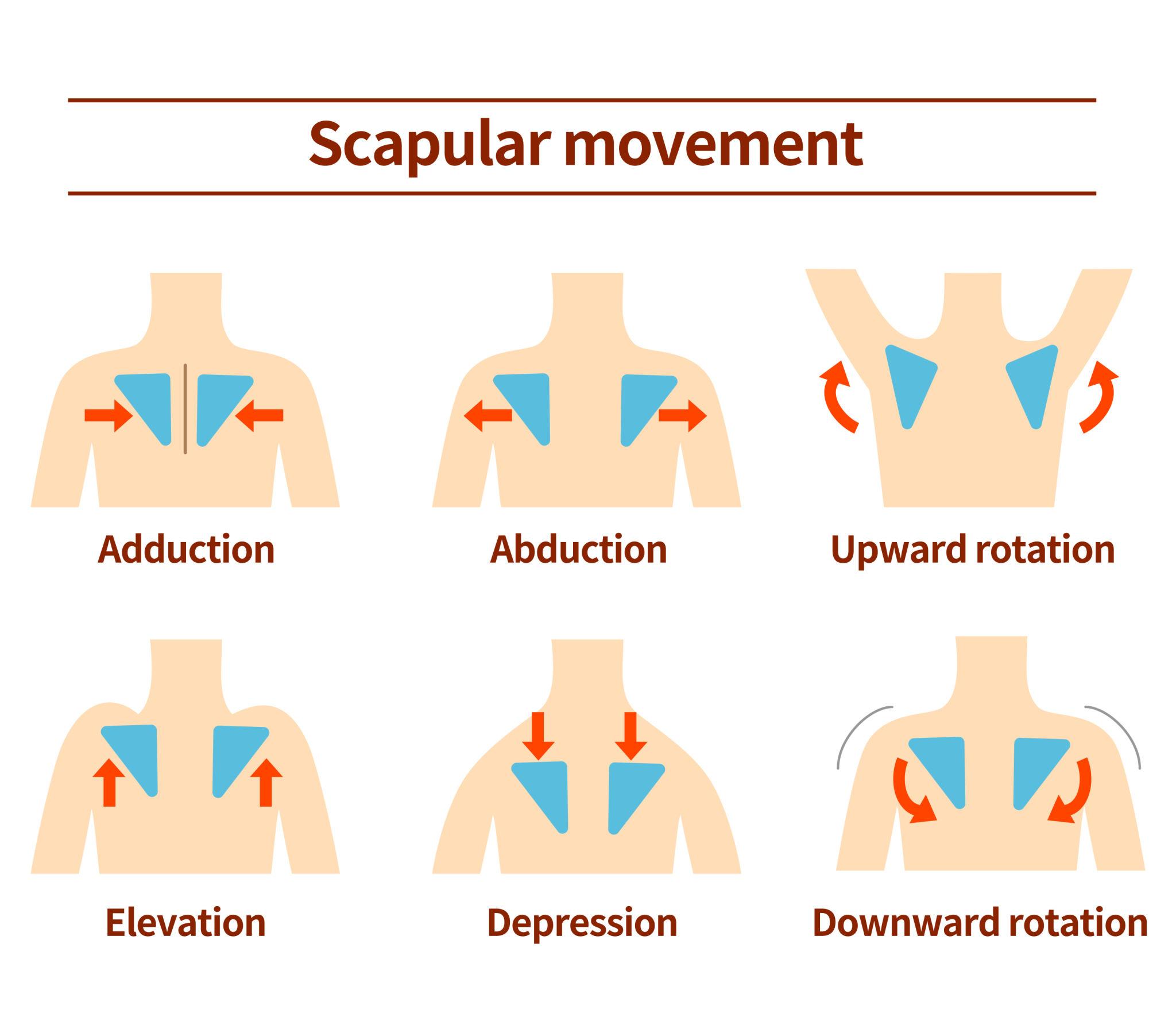
Rytm łopatkowo-ramienny – współpraca łopatki i kości ramiennej podczas unoszenia ręki.
Równoległoboczny – klasyczny stabilizator trickowy
U Arka napięty był również prawy równoległoboczny.
To jeden z najczęstszych stabilizatorów trickowych łopatki.
Mięsień utrzymuje łopatkę w napięciu, ale jednocześnie zaburza jej relację z klatką piersiową.
Efektem jest:
-
ograniczona rotacja łopatki
-
przeciążenie barku
-
zaburzony tor ruchu ręki
Miednica – domknięcie układu
Kolejnym etapem pracy było ustawienie biodra i osadzenie kości krzyżowej.
Miednica jest centralnym elementem układu ruchu.
Jeżeli nie jest stabilna strukturalnie, ciało zaczyna stabilizować ją napięciem mięśniowym.
To ponownie prowadzi do stabilizacji trickowej.
Reedukacja chodu
Dlatego wprowadziliśmy również reedukację chodu.
Polega ona na:
-
aktywnym włączaniu mięśnia poprzecznego brzucha
-
„osadzaniu się w środku”
-
stabilizacji miednicy podczas kroku
To element kluczowy, ponieważ ustawienie musi zostać przeniesione z ćwiczeń do codziennego ruchu.
Objętość kompensacyjna – dlaczego stabilizacja trickowa zwiększa zmęczenie
Stabilizacja trickowa bardzo często prowadzi do zjawiska, które w GSP nazywamy:
objętością kompensacyjną.
Opisaliśmy to dokładnie w osobnym artykule:
Objętość kompensacyjna oznacza ilość ruchów wykonywanych przez ciało w celu utrzymania stabilności, która nie jest stabilnością strukturalną.
Te ruchy:
-
zwiększają zmęczenie
-
zwiększają ryzyko kontuzji
-
obniżają wydajność ruchu
Dlatego często zawodnik wykonuje ogromną ilość pracy, a mimo tego progres jest niewielki.
Energia jest tracona na kompensacje.
Case study z pracy ze sportowcami
Podobne przypadki obserwujemy bardzo często w pracy ze sportowcami.
Przykłady takich analiz można znaleźć m.in. w materiałach publikowanych przez podsztanga.pl, gdzie analizujemy pracę zawodników sportów siłowych.
W wielu przypadkach okazuje się, że problem nie leży w:
-
sile
-
mobilności
-
objętości treningowej
Problem leży w stabilizacji trickowej.
Content Premium – analiza realnych przypadków
Na naszej platformie szkoleniowej znajduje się Content Premium, gdzie publikujemy pełne analizy przypadków zawodników.
Można tam zobaczyć m.in.:
-
nagrania konsultacji
-
analizę chodu
-
analizę biegu
-
interpretację testów biomechanicznych
-
protokoły pracy z zawodnikami
Możesz kupić >> TUTAJ <<
Znajduje się tam już kilkadziesiąt szczegółowych case studies, które pokazują jak wygląda realna praca z człowiekiem według drzewa decyzyjnego GSP.
Mentoring 26 – skuteczne plany treningowe
Przypadek Arka został szeroko omówiony również na Mentoringu 26, który jest częścią cyklu „Skuteczne plany treningowe”.
Na mentoringu omawiamy:
-
logikę decyzji
-
interpretację testów
-
kolejność pracy
-
integrację biomechaniki z planowaniem treningu
Bo w GSP nie chodzi o listę ćwiczeń.
Chodzi o proces myślenia o ruchu.
Podsumowanie
Stabilizacja trickowa jest jednym z najczęstszych powodów problemów ruchowych.
Ciało może wyglądać stabilnie.
Ale w rzeczywistości stabilność może być tylko kompensacją.
Dlatego w koncepcji GSP zawsze zaczynamy od fundamentu:
- stopa
- miednica
- taśmy mięśniowe
- neurologia
- tułów
- łopatka
Dopiero na końcu pojawia się obciążenie treningowe.
Bo tylko wtedy stabilność jest prawdziwa.
A nie tylko jej iluzją.
